Радиолокация - это очень просто (Пешеход) Автор: DIMMI
Создана: 31.03.2011 10:43:55
Изменена: 31.03.2011 11:32:29
Комментариев: 0
Категории: ЗЕМЛЯ / РЛС, РЭБ и т.п. средства / | Радиолокация - это очень просто
Автор - Пешеход, 2011 г.
Источник - http://www.avanturist.org
Точный адрес статьи и обсуждения - http://www.avanturist.org/forum/index.php/topic,1378.0.html
Давайте сначала разберемся с дальностью. Есть некий излучатель электромагнитных колебаний. Если он ненаправленный, то волна распространяется в виде сферы. Тогда плотность потока радиоволны на интересующей нас дальности будет равна мощности источника, деленной на площадь сферы радиусом, равным заданной дальности. Или иными словами, пропорциональна мощности, деленной на квадрат дальности. Если антенна не является ненаправленной, а преимущественно излучает в некотором, интересующем нас направлении, то значение плотности потока нужно умножить на коэффициент усиления антенны. На некоторой дальности и некотором направлении преимущественного излучения объявилась цель. Её отражающая способность определяется понятием ЭПР, эффективная поверхность рассеяния. Мощность, отраженная в обратном направлении будет равна плотности потока, умноженной на ЭПР. И процесс покатится в сторону излучателя по точно такому же закону. Коэффициент усиления антенны – совершенно одинаковая характеристика как на излучение, так и на прием. Тогда мощность на выходе антенны будет пропорциональна произведению мощности излучения, ЭПР цели, квадрату коэффициента усиления антенны и обратно пропорциональна четвертой степени дальности. Для уверенного обнаружения сигнала на фоне собственных шумов, минимальная мощность на входе приемника должна быть порядка мощности собственных шумов приемника. Преобразуя это равенство относительно дальности, имеем – дальность обнаружения цели активной РЛС с пассивным ответом прямо пропорционально корню четвертой степени из произведения отношения средней мощности передатчика к чувствительности приемника, квадрата коэффициента усиления антенны и ЭПР цели. Отношение мощности к чувствительности называют энергетическим потенциалом РЛС. Еще из этого уравнения можно увидеть, что качественные показатели антенны очень сильно влияют на дальность РЛС.
 РЛС с ФАР РСН-225 / FLAT TWIN (фото из архива ВПК, Дементьев Г. СМУ-304 - ГПТП "Гранит" - ОАО "ГНПО "Гранит". // Военно-промышленный курьер. №7 / 2007 г.).
Следует обратить внимание на то, что в формуле фигурирует не импульсная, как следовало бы ожидать, а средняя мощность сигнала. Все дело в обработке принятого импульсного сигнала. После нее, амплитуда сигнала на выходе приемника пропорциональна не чисто мощности, а энергии сигнала. При периодическом импульсном сигнале величина сигнала на выходе приемника будет пропорциональна импульсной мощности, деленной на скважность, а следовательно - средней мощности.
В предыдущих рассуждениях прозвучал термин обнаружение. Он означает процесс выявления факта наличия отраженного от цели сигнала на фоне шумов (в широком смысле – факт наличия цели). Фактически речь идет о пороговом устройстве, производящем сравнение текущего уровня сигнала с неким пороговым значением и по превышению порога принимающего решение о наличии полезного сигнала. Так как шум является случайным процессом, поэтому параметры процедуры обнаружения могут быть описаны вероятностными величинами, такими как вероятность обнаружения и вероятность ложной тревоги. Поэтому величина порога выбирается из текущего уровня собственных шумов приемника и заданных значений этих вероятностей. Причем наибольшую роль играет вероятность ложной тревоги. Оно и понятно, вероятность обнаружения очень легко увеличить посредством многократного повторения процесса обнаружения одной и той же цели, а высокий уровень ложных тревог перегружают устройства помехозащиты до полной неработоспособности. Поэтому зачастую фиксируют уровень ложных тревог, а уж вероятность обнаружения будет зависеть от дальности, ЭПР, мощности и прочего.
Обнаружить цель это еще не все. Нужно определить ее координаты – дальность до цели и ее угловые координаты, азимут и угол места. Дальность это временная задержка от момента начала периода зондирования до половины длительности сигнала, прошедшего через пороговое устройство (середины импульса). Отсюда точность определения дальности равна половине длительности импульса. Угловые координаты определяются направлением главного луча антенны. Он, в свою очередь, измеряется либо непосредственно с датчика углового положения антенны, либо как временная задержка от начала сектора сканирования до середины угловой пачки сигнала (пачка сигналов, образованная посредством модуляции отраженного сигнала диаграммой направленности антенны, точнее ее главного луча). Таким образом, точность определения угловых координат равна половине ширины основного луча ДН антенны. Это первичная радиолокационная информация. На ее основе определяется вторичная – направление и скорость движения цели, траектория движения и ее прогноз и тд.
Для увеличения дальности обнаружения нужно увеличить значение амплитуды полезного сигнала на входе обнаружителя (порогового устройства). Или уменьшить мощность шума (дисперсию его закона распределения). Самое простое решение – согласовать полосу пропускания приемника с формой спектра отраженного сигнала. Белый шум имеет равномерный неограниченный спектр, мощность шумового сигнала на входе обнаружителя будет определяться спектральной мощностью шума и полосой пропускания, поэтому такое согласование дает определенный эффект. Значит чем уже спектр сигнала, тем больше положительный эффект такого решения. А чем уже спектр, тем больше длительность импульсного сигнала. С другой стороны, точность определения дальности тем выше, чем меньше длительность импульса, а дальность обнаружения – чем больше средняя мощность, то есть при фиксированной импульсной мощности, чем больше длительность импульса. Данное противоречие можно разрешить, посмотрев на вторую составляющую полного спектра сигнала – фазовый спектр. У шума он случайный. Хорошо бы создать сигнал, имеющий широкую амплитудную составляющую спектра, детерминированный (известный нам) фазовый спектр и большую длительность. Очень грубо говоря, можно было бы в некотором устройстве собрать с широкой полосы частот и сложить в фазе полезные составляющие спектра сигнала на фоне суммирования спектральных составляющих шума со случайной фазой. Да еще и получить узкий выходной импульс. Есть такие сигналы и есть такие устройства. Устройства называются оптимальные фильтры, а сигналы – широкобазовые сигналы. Не затрагивая вопросы теории оптимальной фильтрации, можно отметить одно свойство оптимального фильтра - при обработке сигнала, на который настроен фильтр, сигнал на выходе является автокорреляционной функцией входного сигнала. Вот и критерий для поиска сигналов, удовлетворяющих поставленному требованию – увеличения амплитуды и уменьшение длительности его автокорреляционной функции (выходного сигнала после оптимального фильтра) по сравнению с исходным сигналом. Никакой амплитудной модуляцией данное требование не выполнить, а вот частотная/фазовая модуляция несущей внутри импульса вполне годится. Такая модуляция называется внутримпульсной. Например линейно-частотно модулированный импульс (ЛЧМ). Это импульс, частота несущей которого линейно возрастает или убывает в зависимости от времени. Оптимальным фильтром для ЛЧМ сигнала является дисперсная линия задержки, у которой величина задержки линейно возрастает или убывает в зависимости от частоты. Тогда на выходе будем иметь узкий и высокий сигнал, что собственно и требовалось. Степень сужения и увеличения амплитуды сигнала с выхода оптимального фильтра определяется базой сигнала, то есть произведением ширины спектра на длительность импульса. Чем больше база сигнала, тем больше полезный эффект оптимальной фильтрации. ЛЧМ импульс является простейшим представителем широкобазовых сигналов. Более сложными являются частотно/фазомодулированные импульсы, где законом модуляции служит специальная кодовая последовательность. Отличительной особенностью сигналов с широкой базой является их амплитудный спектр, он равномерен во всей полосе частот. Что характерно для окрашенного шума. Иногда широкобазовые сигналы называют псевдошумовыми. Применение их позволяет снизить импульсную мощность сигнала путем увеличения длительности импульса при сохранении средней мощности (а значит дальности обнаружения) и точности определения дальности. Это дает массу положительных эффектов как в части облегчения режимов работы передатчика (его импульсная мощность принципиально ограничена пробивным напряжением элементов конструкции передатчика и антенно-фидерного тракта), так и повышения помехоустойчивости и скрытности работы всей РЛС. Кстати, идеальный белый шум имеет в качестве автокорреляционной функции дельта-функцию, сигнал нулевой длительности, бесконечной амплитуды и площадью, равной энергии сигнала. Идеальный зондирующий сигнал для радиолокации. Но не реализуемый из-за своей математической абстракции, так как имеет равномерный бесконечный спектр.
С определением дальности до цели более-менее разобрались. Примемся за угловые координаты. Точность их определения равна половине ширины главного луча диаграммы направленности антенны. Кстати, напоминаю, дальность обнаружения зависит от корня квадратного из КУ антенны (в отличие от корня четвертой из энергетического потенциала). Очень важный элемент РЛС, рассмотрим его поподробнее. Как ни странно, в части зависимости характеристик антенны и ее геометрических размеров дело обстоит точно так же, как в зависимости сигналов и спектров. Если излучающий элемент имеет геометрические размеры много меньше длины волны, то он не обладает направленными свойствами. То есть имеет бесконечно широкую диаграмму направленности в области реальных углов (от нуля до 360градусов). Если геометрические размеры антенны соизмерима или много больше длины волны, то можно представить ее как совокупность маленьких ненаправленных антенн, каждая из которых имеет свою амплитуду и фазу возбуждения. Тогда результирующая ДНА будет представлять собой сумму сигналов от всех элементарных антенн в каждом направлении. Наиболее просто это себе представить в виде векторного суммирования, где амплитуда вектора есть амплитуда возбуждения, а координатный угол – начальная фаза плюс разность хода волны, вызванная отклонением текущего направления от нормали к поверхности антенны. Если устремить величину элементарной антенны к нулю, то сумма преобразуется в интеграл, как две капли похожий на обратное преобразование Фурье. Именно то преобразование, которое связывает спектр сигнала и его форму во временной области. Амплитуды и фазы возбуждения точек антенны в зависимости от их координат на поверхности антенны называется амплитудно-фазовым распределением (АФР). С точки зрения преобразования Фурье, АФР это полный комплексный спектр (амплитудный и фазовый), координаты точек это частота. Тогда значение ДНА это сигнал, угол это время. Но в аналогии ДНА – сигнал есть одна маленькая математическая тонкость. В формуле преобразования ДНА в АФР фигурирует не сам угол, а его гармоническая функция. Это приводит к тому, что в качестве бесконечного времени фигурирует ограниченный по значению 0..360градусов угол. Что неплохо согласуется с реальной действительностью. Если в самом преобразовании ввести понятия эквивалентного угла, имеющего бесконечный интервал значений, и области видимости, ограниченной диапазоном 0..360градусов, то соответствие становится полным. Теперь, вооруженные этим знанием, можем легко сделать нужные нам выводы.
- ДНА имеет принципиально лепестковый характер. При фазовом распределении, не имеющем резких скачков по раскрыву антенны, у ДНА имеется явно выраженный основной лепесток. Именно он называется основным лучом. Он является единственно полезным. Все остальные лепестки называются боковыми и являются вредными.
- Форма ДНА зависит от АФР, в том числе и боковые лепестки. Их уровень снижается при спадающем к краям антенны амплитудном распределении. Максимальная величина основного лепестка получается при линейном фазовом распределении, то есть всегда найдется направление, в котором волна от всех точек раскрыва суммируется в фазе.
- Ширина ДНА зависит от относительных (к длине волны) размеров антенны. Чем больше относительный размер антенны, тем уже ширина ДНА (ширина главного лепестка).
- Так как в преобразовании АФР в ДНА фигурирует разность хода (отношение расстояния к длине волны, выраженная в радианах), то форма ДНА зависит от длины волны, а значит характеристики антенны принципиально являются частотно-зависимыми. Влияние частоты на форму ДНА минимально в случае нулевой разности хода. Это соответствует положению луча перпендикулярному к поверхности раскрыва антенны.
Рассказывать о технических реализациях антенн можно бесконечно долго. Но стоит выделить непрерывные антенны, у которых АФР является непрерывной функцией (например, зеркальные, рупорные, вибраторные антенны и их всевозможные комбинации) и дискретные, у которых АФР является дискретной функцией. Дискретные антенны еще называются антенными решетками. Решетки имеют массу недостатков, но одно достоинство искупает всё. Этим достоинством является простота реализации и управления формой АФР, а значит и формой ДНА. Так как решетки фактически состоят из отдельных излучающих элементов, то, изменяя амплитуду и фазу возбуждения каждого элемента, можно формировать нужную форму ДНА.
Но вернемся к задаче определения угловых координат цели. Нужно направить основной луч ДНА в направлении на цель и зафиксировать значение углового положения луча. Это и есть угловые координаты цели. Однако априори не известно, где находится цель. Для ее обнаружения необходимо просмотреть главным лучом некоторый заданный объем пространства. Этот процесс называется сканированием. Его можно осуществлять механическим поворотом всей антенны. Но медленно, так как вся антенна, как правило, имеет значительные габариты и массу, а значит и большие моменты инерции. Можно создавать наклонное линейное фазовое распределение, например смещением из фокуса (вбок) облучателя зеркальной антенны. Тоже процесс механический, но моменты инерции значительно меньше, можно обеспечить приличную скорость сканирования. Но невозможно обеспечить гибкий обзор пространства в произвольном порядке. А можно управлять фазой каждого элемента решетки посредством электронно-управляемого фазовращателя. Так пришли к идее ФАР (фазированной антенной решетки). Обязательным признаком, позволяющим отнести решетку к ФАР, является наличие в каждом (или большинстве) элементов решетки фазовращателя, управляющего устройства, позволяющего с той или иной точностью устанавливать фазу хотя бы в пределах 0..360градусов. Этого вполне хватает для управления лучом ДНА при использовании не сверхширокополосных зондирующих сигналов. Если это условие выполняется, такая ФАР называется пассивной (ПФАР). Можно в элемент ФАР добавить устройство управления амплитудой элемента, тогда получим следующий этап развития антенных решеток – полуактивная на прием (ПАФАР) и активная на прием-передачу (АФАР).
ПФАР позволяет:
- Осуществлять быстрое (время переключения от долей до десятка микросекунд) электронное сканирование по произвольному алгоритму. Что позволяет совместить в одной РЛС функции обнаружения, сопровождения, управления оружием и тд.
- Управлять шириной ДНА посредством изменения фазового распределения с линейного на сферический.
- В определенных рамках управлять формой ДНА. Например формировать разностную, косекансную и некоторые другие формы ДНА.
- Формировать многолучевую ДНА на передачу, прием или прием-передачу. Для этого используются либо диаграммообразующие матрицы или частотную многоканальность.
- Формировать нули ДНА в направлении на помехопостановщики, так называемая фазовая адаптация.
ПАФАР:
- Все то же, что и ПФАР.
- Имеет лучшую чувствительность (меньшую мощность собственных шумов приемника), особенно в многолучевом режиме.
- Более широкие возможности управления формой ДНА.
- Более широкие возможности формирование нулей ДНА в направлении на помехопостановщики, так называемая амплитудно-фазовая адаптация.
- Имеется возможность несколько увеличить КУ антенны на передачу. Для этого на передачу формируется равномерное амплитудное распределение, обладающее максимальным КУ, а на прием -– спадающее к краям, обеспечивающее минимальный уровень боковых лепестков.
АФАР:
- Все то же, что и ПАФАР.
- Потенциально большую достижимую мощность на передачу.
Кроме очень большого влияния на дальность обнаружения, параметры антенны очень сильно влияют на помехоустойчивость. Особенно уровень боковых лепестков (УБЛ). Оно и понятно, чем хуже УБЛ, тем меньше нужна мощность помехопостановщика, чтобы обеспечить сигнал на выходе приемника, превышающий порог обнаружения, а значит и ложную цель или множество их. То есть, невозможно определить хотя бы угловые координаты помехопостановщика, которые в территориально разнесенной группировке РЛС могут быть использованы для определения его полных пространственных координат методом триангуляции. Низкий УБЛ обеспечивается в первую очередь конструкцией антенны, реализующей спадающее к краям амплитудное распределение и линейное фазовое с требуемой точность. Но есть еще два метода. Один из них – широко используемый метод компенсации помехового сигнала с помощью дополнительных антенн, метод автокомпенсации помех (АКП), ранее называемый подавление боковых лепестков (ПБЛ). Суть его заключается в том, что с дополнительных антенн помеховый сигнал поступает в систему автоматического регулирования (следящую систему), с помощью которой достигается минимум помехового сигнала в основном канале приемника, к которому подключена основная антенна. Чем больше каналов АКП и чем больше перекрытие ДНА этих каналов боковых лепестков основной антенны, тем выше эффективность работы АКП. Из этого следует, что АКП легко реализуема для антенн с малым УБЛ, иначе размеры антенн АКП должны быть соизмеримы с размерами основной антенны. Другой метод используется только в ФАР. Это фазовая или амплитудно-фазовая адаптация. Суть метода – в некоторых пределах испортить АФР антенны таким образом, чтобы нули ДНА оказались направлены в направлении на помехопостановщики, а основной луч (КУ антенны и ширина ДНА), в результате этих манипуляций, пострадал незначительно.
Если речь зашла о помехоустойчивости, то нужно выделять два фактора -– скрытность работы РЛС (стойкость ее к радиотехнической разведке) и собственно помехоустойчивость. При сохранении заданной дальности, скрытность обеспечивается низкой импульсной мощность передатчика и высокой чувствительность приемника, а помехоустойчивость наоборот, высокой средней мощность передатчика и низкой чувствительностью приемника. И все это при высоком КУ и низком УБЛ антенны. К передатчику требования не самые противоречивые. Выше шел разговор про широкобазовые сигналы, у них как раз можно реализовать низкую импульсную мощность при высокой средней и заданной точности по дальности. А вот требования к приемнику оказываются весьма неоднозначными. Поэтому сверхвысокие чувствительности приемника не прижились в областях, связанных с боевым применением РЛС. Кроме реализации этих требований, существует масса других методов. Выше уже упоминали о требовании низкого УБЛ и методы его снижения. Но это не все. Быстрая (между периодами зондирования) перестройка частоты позволяет противостоять заградительной шумовой помехе. Перед началом зондирования производится анализ помеховой обстановки – определение уровня внешних помеховых сигналов на разных рабочих частотах. Для работы используется частота, имеющая наименьший уровень помех. Количество рабочих частот в идеале должно обеспечивать диапазон перестройки, не позволяющей создать в нем помеху с опасной для станции спектральной плотностью. Перестройка частоты, наряду с изменением параметров внутриимпульсной модуляции, позволяет бороться и с ответно-импульсной помехой, полностью имитирующей зондирующий сигнал. В этом случае дистанция по дальности до помехопостановщика остается свободной от его действия. А ложные цели на дистанции за помехопостановщиком легко селектируются в случае наличия территориально разнесенной группировки РЛС, так как они будут иметь одинаковые с помехопостановщиком угловые координаты для каждой станции группировки, а значит разные пространственные, определенные с помощью триангуляции. Еще один метод повышения помехоустойчивости -– накопление отраженного сигнала. С одной стороны, увеличение количества попыток обнаружения, даже с очень маленькой вероятностью обнаружения в одной попытке, приводит к увеличению суммарной вероятности обнаружения. С другой стороны, при накоплении случайный сигнал помехи суммируется по другим законам, чем детерминированный отраженный. Например, при когерентном (с учетом фазы) накоплении складываются амплитуды сигнала и мощности помехи. Таким образом, результирующее отношение сигнал/помеха повышается в количество периодов накопления, а их может быть достаточно много, на станциях предпоследнего поколения до 128 и выше. При использовании некогерентного накопления отношение сигнал/помеха увеличивается несколько слабее, в корень квадратный из количества периодов накопления, но используется достаточно широко из-за простоты реализации.
Для борьбы с пассивными помехами целиком ложится на СДЦ (селекция движущихся целей). Это фильтр, позволяющий подавлять сигнал от целей, имеющих нулевую или достаточно низкую скорость относительно поверхности земли. Принцип работы основан на эффекте Доплера -– смещение спектра сигнала выше или ниже по частоте в зависимости от величины и знака радиальной составляющей скорости. Сигнал от целей с низкой скоростью, а это местные предметы, метеообразования и облака искусственных пассивных помех отфильтровываются в СДЦ. Методов реализации устройства очень много, это и аналоговые фильтры прямого действия, и схемы аналогового черезпериодного вычитания, и классические цифровые фильтры, и фильтры на преобразованиях Фурье. Вообще на помехоустойчивость работают практически все системы РЛС. Например, в приемнике – АРУ (автоматическая регулировка усиления), ВАРУ (временная регулировка усиления в зависимости от дальности), ШАРУ (шумовая регулировка усиления, стабилизирующая уровень собственных шумов), ШОУ (широкополосный фильтр – ограничитель – узкополосный фильтр, позволяющий уменьшить влияние короткой импульсной помехи). Некоторые функции повышения помехоустойчивости реализуются на этапе формирования вторичной радиолокационной информации. Это всевозможное стробирование и бланкирование. Например, цифровое устройство межобзорного бланкирования (ЦУМБ) позволяет избавиться от обработки большого количества отметок от местных предметов, особенно при малых углах места и малой дальности. Грубо говоря, такое устройство определяет координаты таких местных предметов и формирует бланки, не пропускающие сигнал от них на вход обнаружителя. В этих бланках могут формироваться стробы, отменяющие действие бланков в случае захода цели в зону действия бланка. И таких устройств и алгоритмов во вторичной обработке существует множество. Некоторые функции помехозащиты выполняются вовне станции, на КП соответствующей группировки. Например, упомянутая выше триангуляция. Для этого в самой РЛС в обязательном порядке осуществляется максимально точное определение угловых координат помехопостановщика, особенно при невозможности вскрытия забитого им направления. Эта информация отдается на КП для дальнейшей обработки в интересах всей группировки. Поэтому на помехоустойчивость работает не только техническое совершенство самой станции, но и грамотный выбор средств группировки, их рабочих частот, расположение на местности, возможности обмена информацией и тд.
Из факторов, влияющих на дальность обнаружения РЛС, не рассмотренной осталась лишь ЭПР цели. Фактор, не зависящий от самой станции, очень многосторонний и слабо поддающийся строгому теоретическому описанию. Хотя некоторое простейшее моделирование осуществить можно.
Представим трассу распространения электромагнитной волны в направлении цели как длинную линию, начинающуюся от антенны, проходящую через цель и уходящую в бесконечность. Эта линия обладает некоторым волновым сопротивлением, равным волновому сопротивлению пространства распространения, и затуханием, имеющим квадратичную зависимость от расстояния. Цель представляет собой некоторая комплексная нагрузка, параллельно включенная в линию. Если длина волны больше геометрических размеров цели, то это сосредоточенная нагрузка. Если длина волны меньше геометрических размеров цели, то это распределенная нагрузка или некоторое количество параллельных нагрузок включенных на некотором расстоянии друг от друга. Рассмотрим первый вариант. Нулевое отражение от нагрузки будет в двух случаях, когда сопротивление нагрузки бесконечно и в случае равенства значений сопротивления нагрузки и волнового сопротивления среды.
Первый случай эквивалентен полной прозрачности цели. Иными словами, цель имеет те же значения диэлектрической и магнитной проницаемости, что и окружающая среда. Значит, цель должна состоять из воздуха. Однако цель движется в окружающей среде и оказывает на нее влияние, создавая турбулентные вихри, ударные волны, тепловые потоки и так далее. А они имеют разную плотность, а значит разные электрические характеристики. Даже от высоты есть зависимость в электрических характеристиках среды. Поэтому строго это равенство, то есть требование полной прозрачности, выполняется в случае, когда цель состоит из вакуума и в вакууме же движется. Требование равенства волнового сопротивления и сопротивления нагрузки эквивалентно полному поглощению падающей на цель электромагнитной энергии. Это можно осуществить, только обмазав цель слоем радиопоглощающего материала (РПМ) бесконечной толщины. Для предотвращения отражений от границ раздела среды изменение электрических свойств материала должна иметь градиентный характер на всей бесконечной толщине РПМ. Но даже если, наплевав на абсолютное поглощение и широкополосность, ограничить градиентный слой длиной волны, то в случае сосредоточенной нагрузки (длина волны больше размеров цели) требование равенства сопротивлений физически не реализуемо. Значит, имеем первый вывод – для метровых волн мероприятия по снижению радиолокационной заметности существенного влияния не имеют и ЭПР цели зависит только от геометрических размеров цели.
Если длина волны соизмерима или меньше геометрических размеров цели, то нагрузка не является состредоточеной. Ее можно представить как некоторое количество сопротивлений, эквивалентных отдельным конструктивным элементам, включенным на расстоянии друг от друга. Случай прозрачности не рассматриваем как нереализуемый. С поглощением все гораздо сложнее. Во-первых, требование к РПМ становятся более реализуемым. Во-вторых, имеется явление интерференции – суммирование отраженных от разных сопротивлений волн с фазой, определяемой длиной волны и расстояниям между ними. Расстояния между сопротивлениями зависит от геометрической конфигурации цели и ракурса ее наблюдения. Поэтому для определенного ракурса цели и определенной частоты можно обеспечить полную компенсацию отраженных волн от элементов конструкции. Но при изменении ракурса и/или частоты можем получить не ослабление, а усиление суммарной отраженной волны. Поэтому ЭПР цели приобретает сугубо лепестковый и частотнозависимый характер.
Буквально пару слов о вторичной обработке радиолокационной информации. Обычно это определение параметров движения, траекторий, прогнозирование параметров и траекторий, оценка степени угрозы и тд. Как правило, РЛС не в состоянии напрямую классифицировать цель по внешнему виду, так как обычно работает с отметкой от цели как с одной блестящей точкой. Это не значит, что законы природы запрещают напрямую классифицировать цель. Существуют масса методов, позволяющих это сделать. Например, сверхразрешение по дальности. Это возможно при точности определения координат, соизмеримой с размерами характерных элементов конструкции. Тогда структура отраженного сигнала будет зависеть от геометрической конфигурации цели. Однако для разрешения порядка одного метра нужны длительности зондирующего импульса 10нс. Очень мало для получения сколь либо приемлемой дальности. Или многочастотный метод, когда облучение цели осуществляется сигналом, имеющим в своем составе сугубо разные несущие частоты. Так как цель имеет сложную конфигурацию, то отраженный сигнал будет иметь на разных частотах разную интенсивность. Соотношение интенсивности сигнала на разных частотах будет определяться геометрией цели. Но при этом обработка идет на разных частотах по отдельности, значит, мощность делится пропорционально количеству частот, опять падает дальность. И так для каждого метода – или резкое падение дальности, или невысокая точность распознавания, или очень большая сложность технической реализации. Поэтому степень угрозы определяется по траекторной информации. Например, цель с большой ЭПР, средневысотная, мало- и среднескоростная, неманевренная, болтающаяся за границей зоны поражения -– это воздушный КП или самолет РТР. То же, но сильно шумящее – тяжелый помехопостановщик. Маловысотная, скоростная, дозвуковая, редко, но интенсивно маневрирующая – крылатая ракета или ударник. Высотная за границей атмосферы, с параболической траекторией – баллистическая ракета. Но факторов гораздо больше, положение и направление относительно прикрываемого объекта и средств группировки, дальности, прогнозы траекторий и многое другое. По этим параметрам производится оценка степени угрозы, формируется очередь на отстрел и целераспределение.
Все описанное выше относится к классической однопозиционной РЛС с пассивным ответом. Однако этим разновидности РЛС не ограничиваются. Есть активные станции с активным ответом. К ним относятся диспетчерские станции управления воздушным движением и запросчики системы государственного опознавания. Есть многопозиционные РЛС у которых передающая и приемные (а их может быть больше одной) части разнесены на значительные расстояния. Есть станции вообще не измеряющие координаты цели, а только параметры ее движения, например скорость. Многие сталкивались с одним из их представителей. Есть РЛС, измеряющие только дальность, например всяческие дальномеры и авиационные высотомеры. Есть барьерные станции. Есть РЛС с синтезированной апертурой, иначе станции бокового обзора. И так далее. В зависимости от типа и назначения требования к системам РЛС и их параметрам могут в очень большой степени изменяться. К примеру, РЛС с синтезированной апертурой и ее требования к антенной системе. С одной стороны, для обеспечения требуемой дальности и помехоустойчивости она должна обладать высоким КУ, а значит и узким лучом. С другой стороны, для реализации максимальной угловой разрешающей способности и приемлемого диапазона по дальности, она должна быть слабонаправленной.
Если исключить математику, то принцип действия основан на зависимости величины доплеровского сдвига от азимута цели (курсового угла). Он пропорционален косинусу этого самого курсового угла. Если использовать идеальный монохроматический (на дальность пока наплюем) зондирующий сигнал (обладающий нулевой шириной спектра), ненаправленную антенну, а в приемнике узкополосный фильтр, то ширина эквивалентной ДН по выходному сигналу будет определяться шириной полосы пропускания этого самого узкополосного фильтра. А положение луча - центральной частотой его полосы пропускания. И чем выше скорость носителя, тем уже ширина эквивалентной ДНА при фиксированной полосе пропускания фильтра.
Однако на дальность наплевать не получается, так как для получения радиолокационной картинки нужна вторая угловая координата. А она получается как арккосинус отношения высоты полета к наклонной дальности.
Дальность меряем импульсным методом. А так как ширина спектра резко увеличивается, то примитивная фильтрация становится возможной лишь при запредельных скоростях носителя. Поэтому применяются более хитрые корреляционные способы обработки. И чем больше выборка, тем точнее эта обработка. А большая выборка может получиться при широкой азимутальной ДН. Вот и приходится решать задачу оптимизации параметров антенны исходя из требуемой дальности и разрешающей способности.
Кстати, боковой обзор получается исходя из приведенных выше механизмов. Прямо спереди имеем плоскую вершину косинусоидальной зависимости доплеровского смещения от курсового угла, а значит малую углочастотную чувствительность. Максимальна она в районе 90 градусов, то есть перпендикулярно курсу. Прямо под носителем аналогично, нет зависимости угла места от дальности (грубо говоря - меряем высоту). Угломестная ДНА определяет полосу, захватываемую при обзоре на земле (дальность или вторая угловая координата в картинке). В результате антенна оказывается направленной вбок и под углом вниз и представляет собой узкую и длинную (в направлении полета) конструкцию. Причем угломестная ширина ДНА определяет угол вертикального обзора (дальность), а азимутальную эквивалентную ширину ДН определяет качество обработки. То есть, антенна напрямую не определяет угловые точности. Эти зависимости проявляются косвенно, через КУ, а значит максимальную дальность, зону обзора по углу места и степень накопления сигнала.
...
Во время моей службы при испытаниях противорадарных ракет наши станции метрового диапазона на время пусков не выключались, поскольку ПРР засечь такую станцию не способны.
Какова ситуация сейчас? Метровые станции по-прежнему "невидимки", или на них тоже научились охотиться?
Не то чтобы невидимки. Все дело в широкополосности ПРЛГСН ПРР. Она не может быть бесконечно большой. Предположим одна ГСН может перекрыть диапазон от коротких сантиметров до коротких дециметров (диапазоны РЛС ЗРВ), но для длинных дециметров и коротких метров (РЛС РТВ) нужна совсем другая ГСН, с другим ВЧ трактом и совсем другой антенной. А для длинных метров (СПРН и ЗГРЛС) нужна совсем третья ГСН. Поэтому при пуске ПРР по одному классу станций, другой остается в полной безопасности. А вообще, метровый диапазон наиболее сложный для ПРР, большая длина волны, малый диаметр антенн, вследствие этого широкие ДН. Для фазовой пеленгации малые растояния меж элементами из-за малого диаметра самой ПРР по сравнению с длиной волны. Точность наведения похуже, чем на более коротковолновые станции.
...
"В отличие от других насекомых у моли глаза почти не отражают свет. Дело в том, что на их поверхности есть периодическая структура из выступов меньше длины волны света. Эти наноузоры продуцируют плавный переход между показателями преломления воздуха и роговицы. Как итог – отражение света уменьшается и насекомое остаётся невидимым".
...
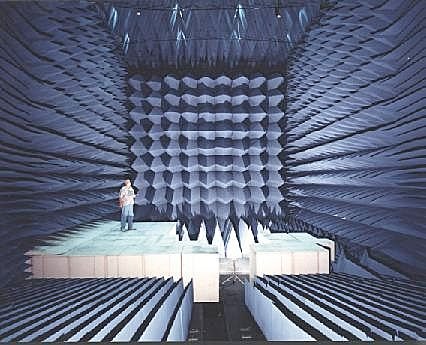
Явление, чрезвычайно давно известное как в оптике, так и радиодиапазоне. Любая физическая реализиции абсолютно черного тела основана на этом эффекте. Я его упоминал, когда рассматривал ЭПР. Это поглощение+интерференция. Причем поглощение при неоднократном отражении от неоднородностей. Все это работает и работает очень хорошо. Но есть одна маленькая тонкость. В приведеной цитате есть неточности, не оговорена длина волны света и сравнительная характеристика "меньше" должна быть заметена на как минимум "соизмерима". Свет - это довольно широкий спектр колебаний, а интерфереренция есть явление частотозависимое. Поэтому чисто интерференционными средствами можно добится эфеекта только на наборе частот кратных основной (f, 2f, 3f...) и в некотором дискретном наборе направлений. Поэтому без поглощения с неоднократным переотражением ничего не выйдет. Плавный переход электрических (оптических) характеристик среды тоже давно извесен и применяется. И в его основе лежит все та же интерференция, только за счет плавности ее результат гораздо хуже, но значительнее широкополоснее. И размеры в этом случае должны быть сугубо больше длины волны. А теперь все это масштабировать на область длин волн от сантиметра до метра и наложить на какой нибудь летательный аппарат. Аппарат перестанет буть лететельным. А стационарные объекты - это запросто. Вот например безэховая камера, с коэффициентом безэховости около -40дБ
уважаемый Пешеход, не могли бы Вы дать комментарии к данным статьям. интересно, каким образом загоризонтные РЛС с очень низкой рабочей частотой могут быть использованы для обнаружения малоразмерных низколетящих ЛА, в частности, КР?
...
А законов природы, запрещающих обнаружение целей такого класса загоризонтными станциями не существует. Малозаметность не является хоть каким-то препятствием для этих станций. Тут главное размеры цели относительно длины волны. Главное, чтобы они не были много меньше длины волны, тогда ЭПР сильно падает чисто за счет малой физической площади. Длина КР 5..10м, если длина волны не более 20..40м, то условия обнаружения вполне нормальные. Высота полета вообще рояли не играет, что для станций поверхностной волны, что для возвратно-наклонного зондирования. Для них все цели низколетящие. А работает тут дедушка Доплер. Поэтому и зондирующие сигналы таких станций выбираются исходя из максмальной возможности доплеровского разрешения, те с минимальной относительно к несущей шириной спектра.
Кстати, о низколетящих целях.
Тут работают два фактора, радиогоризонт и влияние земли на ДНА.
Ну с горизонтом все понятно, либо поднимаем фазовый центр антенны на высоту, обеспечивающую требуемую дальность радиогоризонта, либо используем КВ/СВ диапазон для заглядывания за радиогоризонт.
А вот с искажениями ДНА все гораздо интереснее. Для простоты представим землю как плоскую отражающую поверхность. Над ней парит цель. Фазовый центр антенны тоже находится на некоторой высоте. Рисуем трассы распространения э-м волны. Прямая понятно - линия, соединяющая цель и фазовый центр. Есть еще одна (для плоской поверхности), отраженная от земли. Построить ее не составит никакого труда, а поможет известный с детства "угол падения равен углу отражения". Как только земля становится не плоской, так сразу отраженных трасс становится сугубо более одной. Но это замнем для начала.
Начнем менять высоту цели и строить отраженные трассы. Заметим, что чем выше цель, тем больше угол между прямой трассой и отраженной. А у антенны, если не приняты специальные для того меры, максимальный текущий уровень ДНА тем ниже, чем больше угол от главного лепестка. Значит отраженный сигнал на вход приемника поступает с амплитудой, определяемой уровнем ДНА (чем он меньше, тем меньше сигнал). Где он суммируется с сигналом, пришедшим с основной трассы. Разность фаз зависит от дальности, длины волны, разности углов, свойств поверхности. Грубо скажем - случайный образом. Поэтому может суммировать от полного сложения до полного вычитания. Если снять ДНА в свободном пространстве и при наличии плоской отражающей земли, то нижний скат основного луча ДНА окажется сильно изрезаным, от нуля до двойного значения ДНА в свободном пространстве.
Теперь будем продолжать мысленные эксперементы по снятию зависимости формы ДНА от высоты цели и высоты фазового центра. Первым делом обратим внимание на ситуацию, когда высота фазового центра равна нулю. Тогда трасса распространения всего одна и влияния на ДНА вовсе нет. Вторая ситуация, когда высота фазового центра достаточно велика. Тогда угол между основной и отраженной трассой достаточно велик и ослабление сигнала отраженной трассы посредством ДНА тоже велико. Отсюда выводы. Степень изрезанности ДНА на малых углах места равен нулю при нулевой относительно длины волны высотк фазового центра. Степень изрезанности ДНА достаточно мал при большой относительной высоте фазового центра. Чем уже основной луч ДНА, тем меньше изрезанность ДНА при малом угле места цели.
Собственно, этого достаточно для компоновки антенных систем РЛС для работы по низколетам. При большой дальности, длинной волне, широкой угломестной ДНА антенну РЛС нужно держать как можно ближе к земле. Для небольших дальностей, короткой волне, узкой угломестной ДНА антенну РЛС нужно задирать как можно выше.
то-есть, если, скажем, длина Томогавка 5 метров, длина волны 20 м (15Мгц), отражение будет достаточным для реального применения? много меньше - это в 10 и более раз?
и какова зависимость эффективности РЛС в зависимости от соотношения размеров объекта к длине волны если длина волны больше чем размеры объекта?
При очень длинной относительно размеров цели волне, она будет огибать цель как материальную точку. ЭПР резко падает, тк на этих частотах речь идет не о плошад цели, а об эффективной высоте эквивалентной антенны, которая зависит от относительных размеров цели.
Приведенных длинах волны и размеров цели достаточно для обнаружения. Вообще-то это вопрос комплексный и зависит от приведенных в первом сообщении параметров РЛС. Но скажем так, ЭПР цели при данных соотношениях будет вполне приемлемой.
Несколько наивно, но по большому счету верно. Только вот совмещение средств пассивной радиолокации, Газетчиков и надувных макетов - это не вундервафля, а всего лишь одна из мер комплекса общей помехозащиты.
Кстати, последние надувные макеты средств ПВО просто чудо как хороши. Особенно С-300ПМ. Ознакомтесь, в "Современных ВС РФ" и фотки и ссылки на них пробегали.
А поставки подобных вещей уже довольно давно всяческим попуасам предлагались. Только попуасам это не надо, один фиг они реально с серьезным противником воевать не собираются, им только что-нибудь на параде провести. А надувнушки и Газетчики на парад не катят.
К вопросу о зависимости точности/разрешающей способности от частоты.
Имеет место быть. Но в неявном косвенном виде. Несколько механизмов работают на эту зависимость. Точность/разрешающая способность зависит от длительности импульса после оптимальной обработки. А длительность этого оптимально обработанного импульса зависит от ширины спектра исходного сигнала. Причем не важно, какой исходный сигнал используется, узкобазовый или широкобазовый, чем шире спектр - тем больше точность/разрешающая способность. Это с одной стороны. С другой любые радиотехнические узлы, устройства и системы имеют ограниченную полосу пропускания. Чем уже относительная (к центральной частоте) полоса пропускания устройства, тем выше его характеристики (меньше потери, меньше КСВ, больше усиление и тд). Поэтому при одинаковой ширине спектра сигнала, более высокие несущие частоты предпочтительнее из-за уменьшения относительной ширины спектра, а значит уменьшения требований к относительной широкополосности аппаратуры. А это или лучшие характеристики или более простая реализация. Это один фактор. Есть еще один фактор, работающий только в РЛС. Мощность принятого сигнала зависит от геометрической площади антенны (плотность потока умноженая на площадь). При одинаковых значениях ширины луча, большая площадь антенны будет при более длинной рабочей волне. Поэтому обычно чем больше дальность, тем ниже рабочая частота. А чем больше дальность, тем больше нужна средняя мощность, значит более длинный импульс. Собственно именно поэтому более коротковолновые станции имеют меньшую дальность, более короткий импульс и большую точность/разрешающую способность по дальности. Ну и еще один момент. Чем больше элементов разрешения на дистанции (дальности), тем больше ложняка (ложных тревог), тем больше ресурсов требуется для обработки радиолокационной информации. А они не безграничны.
О поглощении. Самое большое значение в уменьшении сигнала имеет дальность. Ослабление пропорционально квадрату растояния в одном направлении. При отражении - четвертой степени растояния. Всеми остальными факторами для длин волн больше миллиметров можно с полным основанием пренебречь. На миллиметровых волнах работают резонансные поглощения (за счет возбуждение молекул) водяными парами, молекулами углекислоты, азота и кислорода. Так как поглощение резонасное, то полоса частот такого поглощения чрезвычайно узкая и просто-напросто учитывается при выборе рабочих частот. Есть еще паразитные отражения от плотных аэрозолей (облака, туман, пыль и тд) тоже ослабляющий падающий сигнал. Для них чем короче волна, тем больше отражения.
О распространении радиоволн.
Вопрос с радиогоризонтом на самом деле не так прост, как кажется. Если рассматривать сферу в вакууме, то даже там не работает простая геометрия, тк еще имеем интерференционные явления на границе световой и теневой областей. Если берем сферу с газовой оболочкой, то за счет гравитации имеем изменение плотности газовой оболочки в зависимости от высоты от поверхности сферы. Если облучить эту газовую оболочку очень широким спектром элетромагнитных колебаний (от радио до гамма) да еще добавить высокоэнегретический корпускулярный поток (солнечный ветер), то выяснится, что есть не просто градиент плотности газовой оболочки, но еще и градиент степени ионизации газов. А учитывая, что сфера является магнитом и движение заряженных частиц происходит в неравномерном магнитном поле, то все еще сильнее запутывается.
Высотный градиент плотности атмосферы позволяет немного заглядывать за "горизонт" чисто за счет уменьшения плотности атмосферы, а значит и ее коэффициента преломления. Это нормальная рефракция.
Всяческие ионизированные слои уже не являются диэлектриками. Скорее всего их можно представить как проводящую сетку с размерами ячейки, зависящими от плотности, степени ионизации, толщины слоя и тд. Еще эта сетка находится на разной, не постоянной по времени высоте. Если длина волны много больше эквивалентного размера ячейки, то волна не проходит через нее. Если при этом длина волны соизмерима с высотой слоя, то имеем нечто вроде волновода или полосковой линии. Отсюда дальнее распространение ДВ/СВ. Для СДВ длина волны уже соизмерима с радиусом Земли и даже не имея этих "сеток" наблюдался бы эффект сверхдальнего распространения чисто за счет интерференционных явлений. Если длина волны много меньше высоты "сетки" и много больше размера "ячейки", то происходит отражение от "сетки" и от земли. Характерно для КВ. Когда длина волны соизмерима с размером "ячейки", то происходит рассеяние волны на электрических неоднородностях слоя, часть энергии проходит насквозь, часть отражается. Если размер ячейки много больше длины волны, то соответствующий слой не оказывает заметного влияния на прохождение волны.
Но атмосфера не является стационарным объектом. Там существуют всяческие вихри, струйные течения, облака пыли и гидрометеоров, ионизационные следы от обычных метеоров, области ионизации от грозовых явлений. Да и земная поверхность изобилует геометрическими и электрическими неоднородностями. Все это в значительной мере искажает картину распространения радиоволн. Поэтому возникают всяческие интересные явления, вроде сверхрефракции, когда обыкновенная дециметровая РЛС с дальностью 300км начинает видеть на тысячи километров. Я как-то рассказывал соответсвующую байку.
К вопросу о ФАР.
Это всего лишь одна из разновидностей антенн. В ее названии определяющими являются две буквы Ф - фазированная, Р - решетка.
Решетка означает, что антенна являет собой совокупность отдельных элементарных антенн (элементов решетки), находящихся на растояниях соизмеримых с длинной волны.
Фазированная означает, что имеется тот или иной механизм управления фазой возбуждения элементов решетки.
Что дают эти буквы? Буква Р дает возможность формирования практически произвольного по раскрыву антенны амплитудного распределения. У непрерывных антенн с этим есть определенные конструктивные сложности и для некоторых видов амплитудного распределения, непреодолимые. У решеток, особенно с закрытым (фидерным) распределителем, амплитуду возбуждения каждого элемента можно сделать любую и независящую от аплитуды возбуждения соседнего элемента. Буква Ф означает, что посредством независимого управления фазой каждого элемента решетки можно создать любое фазовое распределение по раскрыву антенны.
Немного выше я писал, что форма ДНА является функцией (обратным преобразованием Фурье) от АФР (амплитудно-фазового распределения по раскрыву антенны). Поэтому можно сформировать любую требуемую ДНА и управлять положением ее главного лепестка (луча). Если управление фазой быстрое, например электронное, то появляется возможность быстрого и произвольного (независящего от предыдущего положения) управления положением луча. Но за это приходится платить большими, по сравнению с непрерывными антеннами, потерями. Оно и понятно, появляются как минимум два новых элемента, распределитель и фазовращетель, появляются потери непосредственно в них и потери на согласание с ними. А потери это в чистом виде уменьшение КУ при прочих равных условиях. Но возможность электронного сканирования, вкупе с упрощением создания антенн со сверхнизкими боковыми лепестками, окупает эти издержки. Электронное сканирование и управление формой ДНА сильно облегчает реализацию всевозможных алгоритмов обзора, тем самым облегчая создание многофункциональных РЛС. Уменьшение УБЛ (уровень боковых лепестков) позволяет очень сильно увеличить помехозащиту РЛС. Но за это приходится платить бОльшими весами, стоимостью, сложностью в эксплуатации, меньшим энергетическим потенциалом и зачастую меньшей широкополосностью. Про управление ФАР я уже писал в "Как оно тикает". Там же приводил один из возможных методов управления ДНА ПФАР на примере дискретно-фазовой адаптации.
http://www.avanturist.org/forum/index.php/topic,168.msg274264.html#msg274264
А вот здесь написано про результаты работы тех самых алгоритмов дискретно фазовой адаптации.
http://www.avanturist.org/forum/index.php/topic,800.msg486522.html#msg486522 | | | | | | | Каталог Последние комментарии | PPP Wrote:OlegOleg Wrote:ну а какие есть далекие от реальности?Ну, например HFSS-13... | | OlegOleg Wrote:Мда.. Ансис широко шагает по планете. За это добро они запросят тоже... | | PPP Wrote:Ну, например HFSS-13 - там можно построить диаграммы ЭПР относительно... | | OlegOleg Wrote:ну а какие есть далекие от реальности?Ну, например HFSS-13 - там... | | DIMMI Wrote:а мне кажется с низкой точностью вычислений можно и пренебречь высотой... | | а мне кажется с низкой точностью вычислений можно и пренебречь высотой объекта... | | PPP Wrote:хоть как-то приближенную к реальности - никакой. :crazy:ну а какие есть... | | OlegOleg Wrote:Кто подскажет какой программой можно посчитать ЭПР летящего на определенной... | | :ROFL: | | DIMMI Wrote:в экселе при желании на макросах можно много чего запрограммить...Можно... |
|